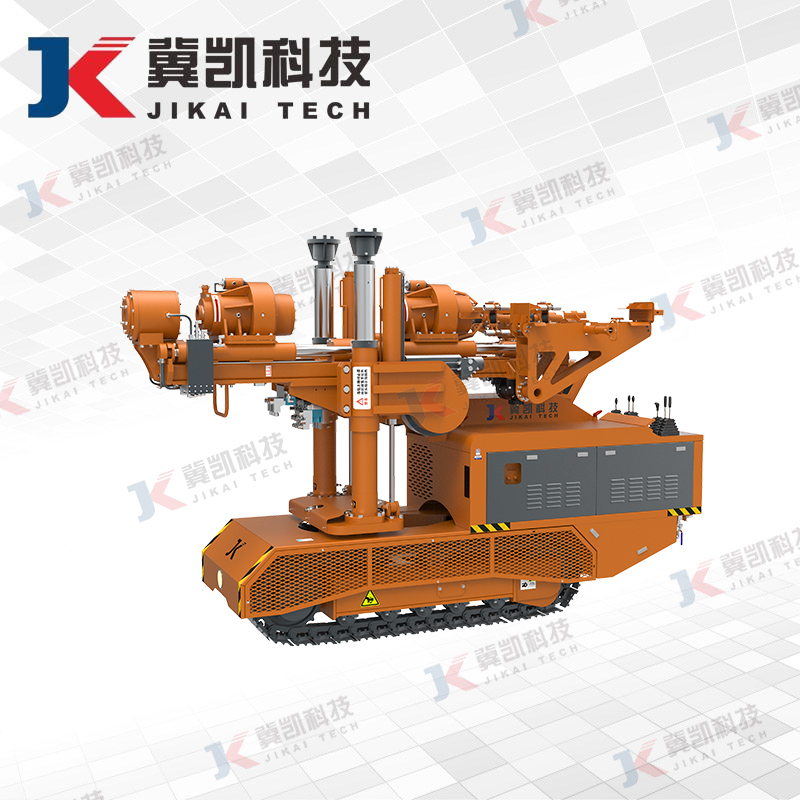
钻探机器人
钻探机器人属于电液自动比例控制、履带自行式、无线遥控、全方位、连续钻进液压钻车,主要用于煤矿井下探水、防突、防冲等钻孔,配有钻进自动控制系统,采用无线遥控操作。钻车装有自动钻杆库、往复动作机械手以及双动力头配置,操作人员通过遥控器启动自动模式,机械手自动从钻杆库抓取钻杆,安装在后动力头前一根钻杆尾部,前、后动力头通过自动程序控制来回往复,交替夹紧钻杆打入煤层,自动从煤层中退出钻杆,实现连续打钻的功能,时间短、用人少、效率高。
技术特点
自动打钻
自动打钻,操作人员只需向钻杆库添加钻杆,无需人工干预。
持续回转
打钻过程钻杆保持回转不停转,避免了塌孔引起的卡钻现象。
智能钻进
钻探机器人含有记忆功能,遇到地压或瓦斯压力过大时,仅保持回转动作排粉,排粉后继续按原动作执行。
节能高效
钻探机器人可用螺旋钻杆干式打钻,亦可用地质钻杆湿式打钻,湿式打钻时,钻杆持续通水,无需更换送水器,无返水等待过程。
智能显示
钻探机器人上装有智能显示及检测系统,工作时可实时统计和显示输出扭矩、输出转速、打孔深度、主泵压力、副泵压力、给进压力、起拔压力、油温、打钻角度等。
故障诊断
温度超过设定值、电机过载、系统欠压、主回路漏电等故障,系统均有检测与报警,指导维修人员快速处理。
性能参数
项目名称 |
CMS1-1600/37YL |
CMS1-2200/45YL |
CMS1-3500/55YL |
CMS1-4000/55YL |
CMS1-4500/55YL |
|---|---|---|---|---|---|
钻臂数量(个) |
1 |
1 |
1 |
1 |
1 |
额定转矩( N.m ) |
1600 |
2200 |
3500 |
4000 |
4500 |
额定转速(r/min) |
100 |
86 |
75 |
70 |
60 |
推进力(kN) |
65 |
100 |
120 |
140 |
140 |
起拔力(kN) |
65 |
100 |
120 |
140 |
140 |
推进器长度(mm) |
3700 |
3700 |
3700 |
3700 |
3700 |
推进行程(mm) |
400-400 |
400-400 |
400-400 |
400-400 |
400-400 |
臂身调整角度(°) |
-45~+90 |
-45~+90 |
-45~+90 |
-45~+90 |
-45~+90 |
爬坡角度(°) |
±20 |
±20 |
±20 |
±20 |
±20 |
额定功率(kW) |
37 |
45 |
55 |
55 |
55 |
额定电压(V) |
660/1140 |
660/1140 |
660/1140 |
660/1140 |
660/1140 |
地质钻杆(mm) |
Φ73 |
Φ73 |
Φ73 |
Φ73 |
Φ73 |
螺旋钻杆 |
Φ73 |
Φ73 |
Φ73 |
Φ73 |
Φ73 |
地质钻头 |
Φ94/Φ108 |
Φ94/Φ108 |
Φ94/Φ108 |
Φ94/Φ108 |
Φ94/Φ108 |
防塌孔钻头 |
Φ110 |
Φ110 |
Φ110 |
Φ110 |
Φ110 |
专利·荣誉情况
- 拥有国家专利20项
- 拥有发明专利12项

矿用电磁波随钻轨迹测量仪
井下钻探是煤矿取得地质资料及消除安全隐患的技术手段。目前煤矿生产中施工的钻孔不进行钻孔轨迹测量,造成地质资料误判、技术措施不到位的情况时有发生。为解决这一问题,根据钻孔轨迹测量原理研发出电磁波随钻轨迹测量仪。
技术特点
数据实时无线传输,速度快,精度高。
实时显示钻孔轨迹。
安装拆卸方便操作。
性能参数
项目名称 |
YZG18.5 |
|---|---|
适合钻杆直径(mm) |
Φ73 |
测量方位角(°) |
0°~360° |
方位角检测精度(°) |
±2° |
测量倾角(°) |
﹣90°~90° |
倾角检测精度(°) |
±0.2° |
有效测量距离(m) |
≧200 |
测量精度偏差(m) |
≦±0.5 |
探管工作时间(h) |
≧100 |
工作环境温度(°) |
﹣25°~﹢75° |
数据传输方式 |
无线•实时 |
专利·荣誉情况
- 拥有国家专利20项
- 拥有发明专利12项